穿越机练习原则与进阶——11——室内自稳
3893 2023-06-19 09:40 2024-01-04 15:58
往期内容:
穿越机练习原则与进阶——2——左半心/右半心-左小旗帜/右小旗帜
穿越机练习原则与进阶——6——不同角度下的转弯,用简单,最直白的正交基(不带其他分量)来完成反人类过弯
穿越机练习原则与进阶——8——摄像头角度、机身自身重量和油门的50%所确立的角度到底意味着什么——关于超跑
穿越机练习原则与进阶——9——弹簧单高跷(兔子跳同手同脚)、用屁股坐进洞里、间歇性刷锅
穿越机练习原则与进阶——10——翻滚、综合能力、学会用屁股坐实、真正的刷锅
半圆或圆:
像倒扣一个盆或者碗,在桌面上边沿贴着桌面转动飘摇,然后越来越小、越来越快最后停下。
左偏航对应的是逆时针的上半圆或者下半圆,右偏航对应的是顺时针的上半圆或下半圆。或蝴蝶的两个左下角、右下角。
上半圆对应甩尾倒车。
反向打杆:
反向打杆,综合加油+左偏航对应的是右下偏航横滚,加油+右偏航对应的是左下偏航横滚。或者说左偏航对应的是右下偏航横滚。用于调整姿态方向
反向打杆左偏航对应右横滚抬高。
加油拉俯仰是为了抬高刹车,收油推俯仰是为了俯冲前进
稳定的诀窍:
把镜头,朝向倾斜的方向,然后拉俯仰。这将快速稳定小机。如果在不紧张的情况,没有俯仰方面的问题,静止情况下,可以调整横滚。
第1步:在有前进速度并且匀速前进,或者稍有前进推俯仰的角度时,打横滚,让机头沉向要拐弯的方向。
第2步:机头偏航向上一步横滚导致的下沉方向。原则就是机头永远面向整个机身的最下端,这样才是最正的前进,因为是面向操作,所以只用考虑拉俯仰平衡和推俯仰抵消速度,让自己滞空。
第3步:拉俯仰,让机身水平,如果偏航角度需要停留在横滚角度不水平的旋转结果上,那么用反向横滚抵消。
第4步:推俯仰进行前进,进行下一步动作。平地俯仰的第一步就是推俯仰获得第1步的前进。然后进行2、3、4.
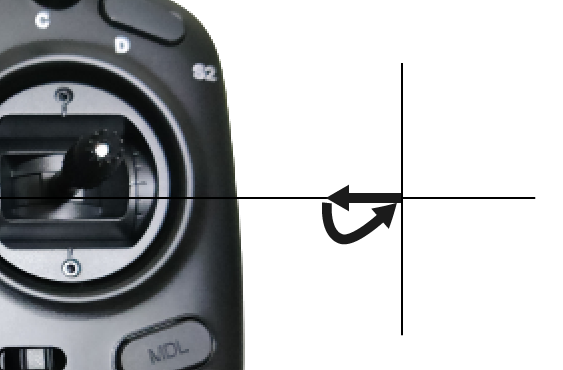
小窍门:
转弯时,偏航角度固定不变,左手固定,然后靠右手画小圆来稳定拐弯时候的姿态。
几种常见的调整手法:
1.前进并且左转,左手需要配合给偏航

2.左转并刹车,左手需要配合给偏航
3.甩尾倒车,左手需要配合给偏航、收油门

4.回正

沿锅沿刷锅和四指向下刷锅本质区别在于沿锅沿刷锅是较容易控制的,而四指向下刷锅对漂移产生的位移在初速度和转向角速度(偏航)的把控都会出现更多不同的情况。而沿锅沿刷锅只要你给够油门,它甚至会原地停止。因此将两者结合起来的45度刷锅成了我的日常训练科目。你可以在任意时候选择转换成两种刷锅模式。而留有余地。
姿态重要(俯仰、横滚),还是方向重要(偏航)。原来我以为方向重要,因为只要你一直盯着目标,那么姿态是可以通过小范围画圆来调整的。后来在越来越多的拐弯后,我发现,方向的提前变化和之后变化,可以使用漂移刷锅(四肢向下刷锅)和沿锅沿刷锅的不同效果。这时候我才发现,其实最重要的是自身的姿态,只有自身的姿态确定了,才能确定去往方向的路上采用什么样的策略。因此,我把右手放在身体的正前方,这样难免造成左手的悬空,并且向右后方推挡左前角。也就是肚皮会承受左手的向右后的压力。同时由于遥控器在身体正中央,所以难免会造成右手顺时针旋转一定角度来保持对左手的应力。而右手贴合的平行的粘合在板控的右侧,为遥控器的正规化起到了标校作用。另外为配合右手舒适,板控可能会左前角下沉,以延伸右前臂的方向。以及肚子抵住的地方和胳膊肘的平面的延伸。
自稳的关键在于平衡。在于由动到静的惯性消失。与 平面二维的摩擦力不同,穿越机有着三维的动力,所以在平飞的基础上,快速停止并悬停,关键在于消失了水平的动能之后,穿越机的角度如何抵消,简单说就是收油门的同时,将角度平衡掉,为什么是收油门,因为穿越机所有的桨叶都是升力。在一个边为基础,另一个边找平的过程中,永远是另一个边提供升力找平,而不是反向给一个向地面的力。所以在找平之后必定会拉高,需要收油抵消。而这个找平过程有两种,一种是横滚找平,一种是俯仰找平,上一节说过,按照人类的思维,要把摄像头偏航朝向穿越机最低的那个方向,这样势必拉俯仰让自己抬头。而如果你在转弯时是90度,并且是沿锅沿刷锅的时候,那么就是纯横滚找平,俯仰在水平面上。自己多加体味。
分类
热门文章

Tags
关于
提供Arduino芯片编程、Java网站设计、抢票系统、秒杀系统的支持以及创客服务
全部评论