穿越机练习原则与进阶——13——绕中心旋转横滚导致方向偏离多少偏航就修正多少
3121 2023-08-12 09:56 2025-07-24 11:19
罗德里格斯公式视频演示:B站直通链接
旋转视例1:
对应的fpv视角:
旋转视例2:
对应的fpv视角:
旋转视例3:
可以看到,想要以摄像头为轴旋转,不配合使用偏航是无法得到收敛效果的。
由旋转视例1、旋转视例2可知,线速度相同。角速度的比值等于sin摄像头仰角。
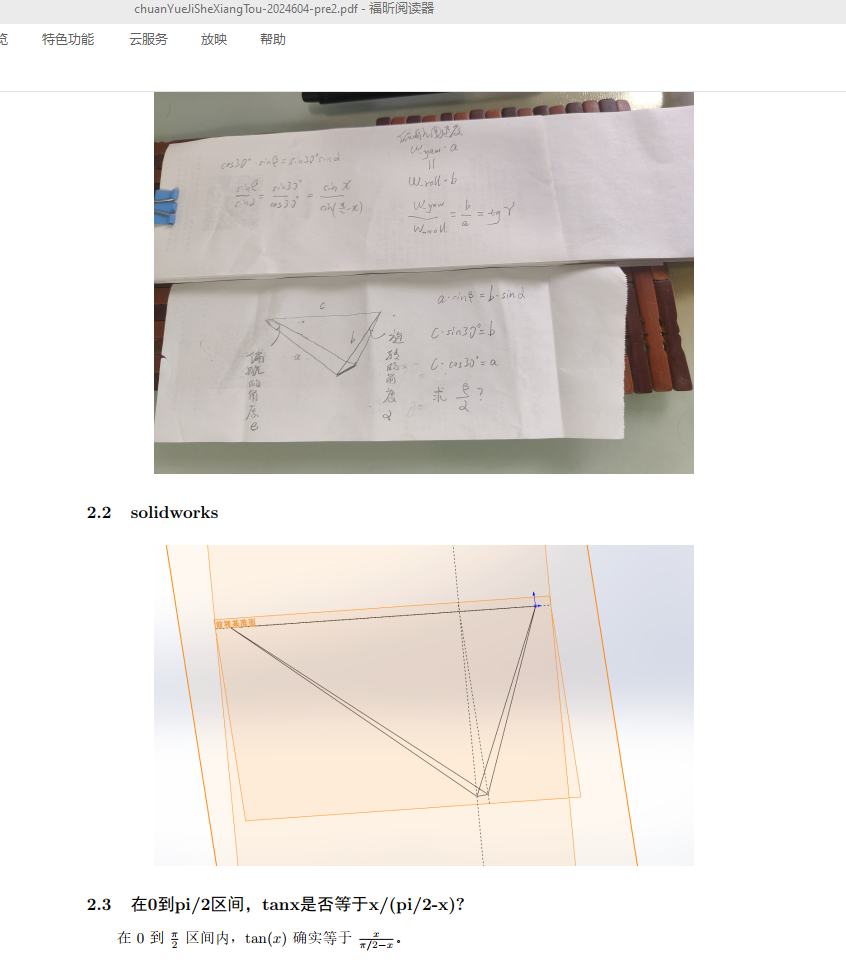
证明过程chuanYueJiSheXiangTou-20241209-pre4
对非会员隐藏
侧空翻和后空翻一样,都可以在初始阶段给油,但是对于侧空翻,给油会造成偏航角度在收油时有偏差,所以建议给油期忽略偏航。然后在空翻回中时,同步给油。
在稻草图中,意外的钻了一个低空洞。本来以为是训练结束的洞。其实还有一个。然后就意外的发现了真正的定点横滚。
轨迹叠加:我们现在已经明白了如何在摄像头有角度的情况下,将开始处于屏幕地平线上的旋转点移动到屏幕的正中央。那么我们如何将旋转点定在屏幕的左侧或者右侧呢?那就是横滚叠加俯仰。如果横滚时叠加推俯仰,那么摄像头的轨迹就会绕左前方旋转,定点就偏左。如果横滚时叠加拉俯仰,那么摄像头的轨迹就会绕右前方旋转,定点就偏右。而此时偏航的作用就是维持地平线在屏幕中央旋转。
ps:
p拉高曲率,d降低幅值,i逼近静态误差。以电机发热来确定d,以d能压制住来确定p,以抗风性来确定i。以d来对抗洗桨。这就是穿越机调参。
为什么pid好调,lqr很专业。因为pid是个按步骤收敛的却又在某时刻崩溃的调参过程,而lqr是一个全滑条的各种搭配。并没有线性曲线可以像pid那样过渡。所以你可以用lqr模拟出pid的各种感觉。但是你很难精准。而pid可能很精准,但是你不知道会有多少种组合可以达到同样的一段旋律,而在两端很崩溃。
穿越机的宽x结构。让我更清楚的看到。转动惯量在pid稳定性上的重要作用。那些说重心越低,平衡车越容易平衡的人,和那些用2寸穿越机的人一样。他们没有见过5寸穿越机,没有使用过。但是就凭自己的经验说结论。只能说见识限制了他们的想象力。
宗旨:
绕中心旋转是,横滚偏离多少,偏航就修正多少;而四指向下刷锅,则为偏航偏离多少,横滚就修正多少。两者最后都变成了sin
往期内容:
穿越机练习原则与进阶——2——左半心/右半心-左小旗帜/右小旗帜
穿越机练习原则与进阶——6——不同角度下的转弯,用简单,最直白的正交基(不带其他分量)来完成反人类过弯
穿越机练习原则与进阶——8——摄像头角度、机身自身重量和油门的50%所确立的角度到底意味着什么——关于超跑
穿越机练习原则与进阶——9——弹簧单高跷(兔子跳同手同脚)、用屁股坐进洞里、间歇性刷锅
穿越机练习原则与进阶——10——翻滚、综合能力、学会用屁股坐实、真正的刷锅
穿越机练习原则与进阶——13——定点旋转翻滚偏离多少修正多少
分类
热门文章

Tags
关于
提供Arduino芯片编程、Java网站设计、抢票系统、秒杀系统的支持以及创客服务
全部评论