
穿越机RSSI和LQ值
RSSI(Received signal strenth indication)接收信号强度的指示——声音大小——和发射功率、距离有关 信号强度、功率大小、dbm、当前接收信号的功率和1毫瓦的比率 R

mobula7小薯片注意事项
选择电池类型:LiHv 电池串数:4S(充电时并充板同时接两块2S电池) 电池电压:4.35V OSD显示电压不得小于3.5,否则就是过放 任务选择:充电、存储 图传频率5905、5917、5925(
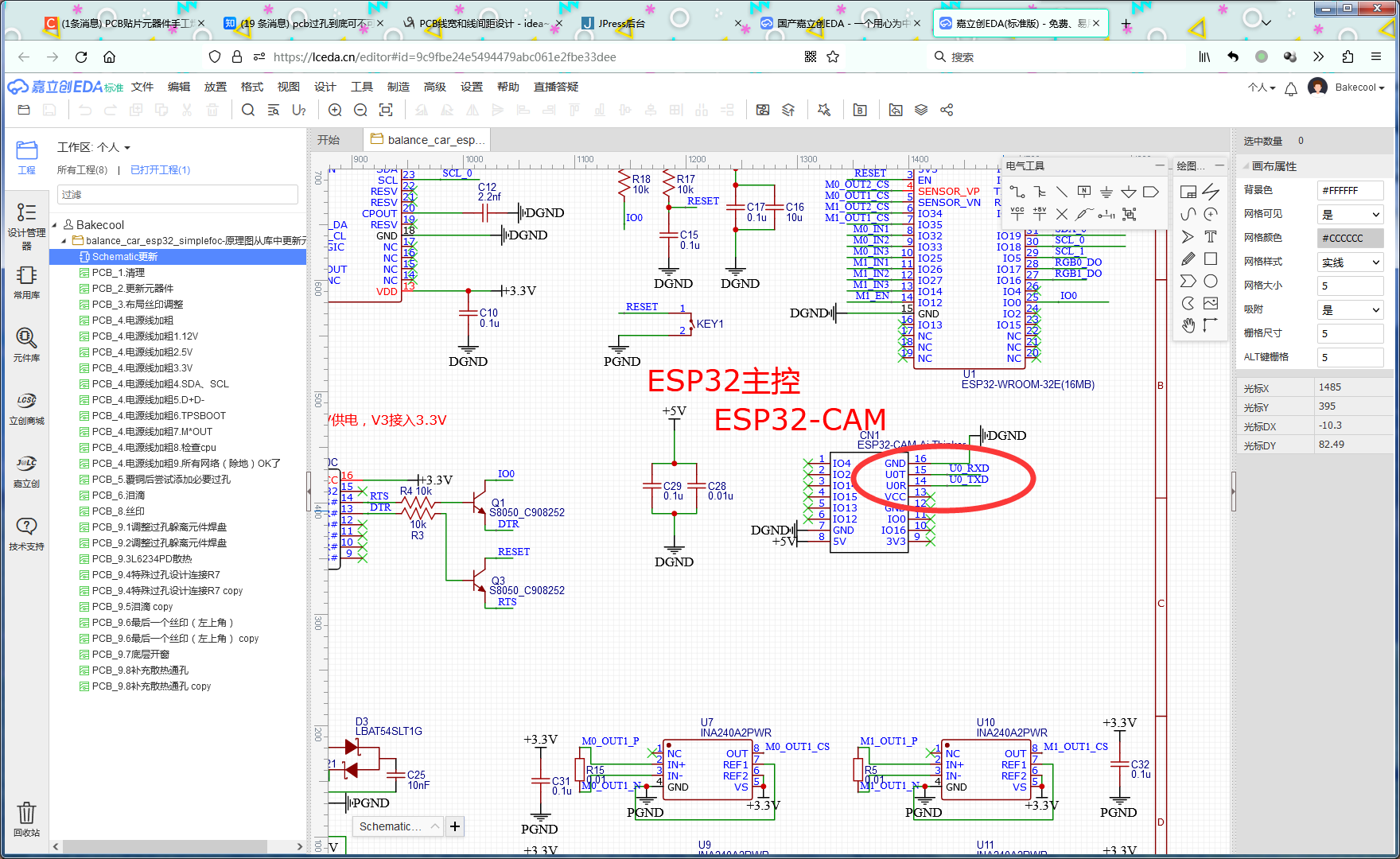
总结2022年9月自己画的电路板
首先来个文档学习线宽和线间距设计。 然后再说大的错误,虽然后续发现即使正确了也无法直接使用。 图中发送和接收的引脚在原理图时就画反了,导致在连线完毕后,实在没有力气想重新调整。但是后续发现,因为是5v
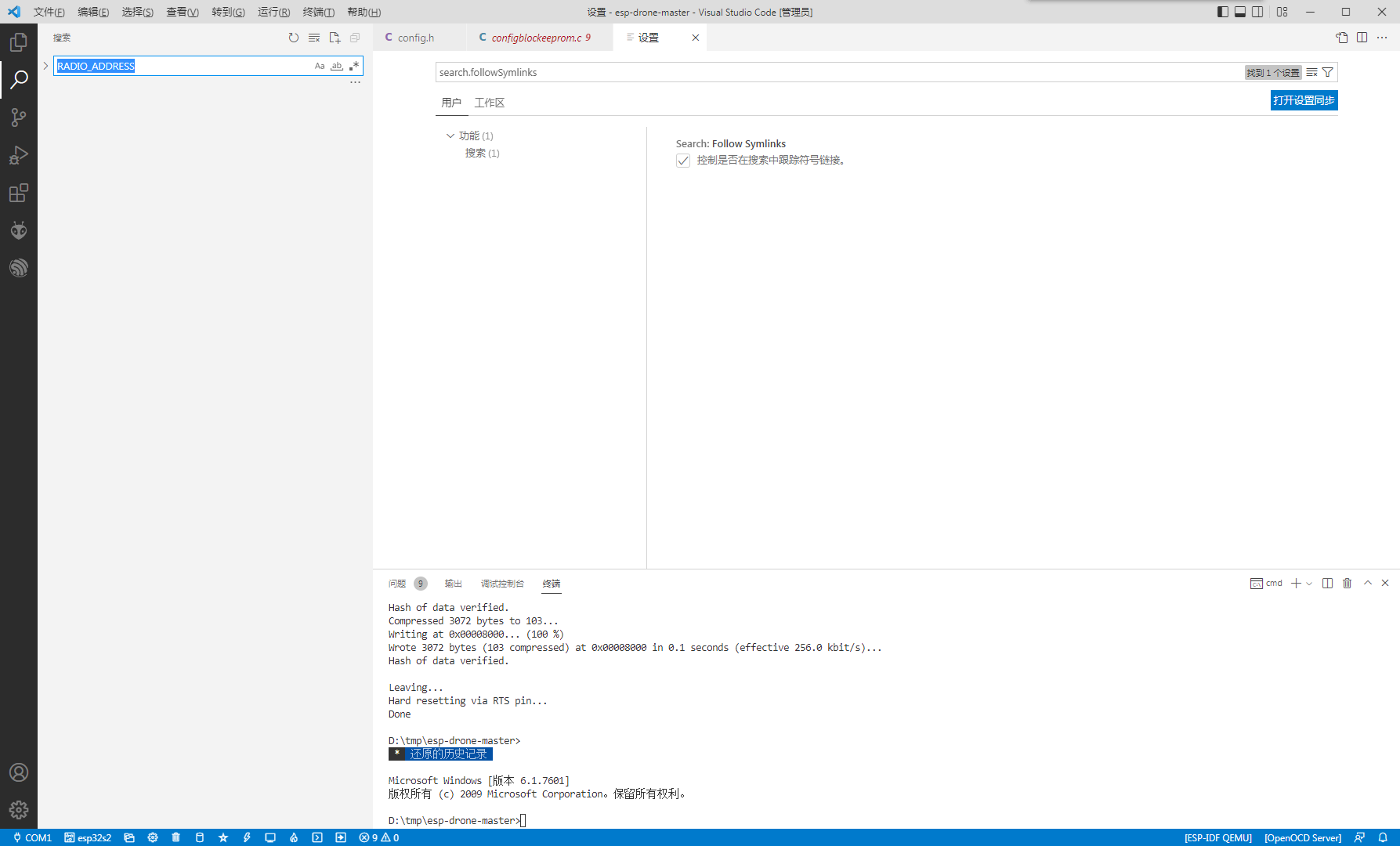
解决vscode内存报警需要关闭的问题
文件—>首选项—>设置 search.followSymlinks 关闭(去掉勾选) ctrl + shift + p 根据您当前的上下文访问所有可用命令。 同eclipse alt+左右
安装指定espdrone的cflib
git clone -b esp-drone git@gitee.com:bakecool/crazyflie-lib-python.git cd D:\tmp\leeebo-espdrone-cra
平衡车问题排查ppcheck无法通过
如果是灯哥开源的电机,需要simple-FOC2.2.1句号。 如果是我自己的小车,注意,不管是测kv值用arduino例程验证,还是用vscode platformIO上传,都需要simple-FO
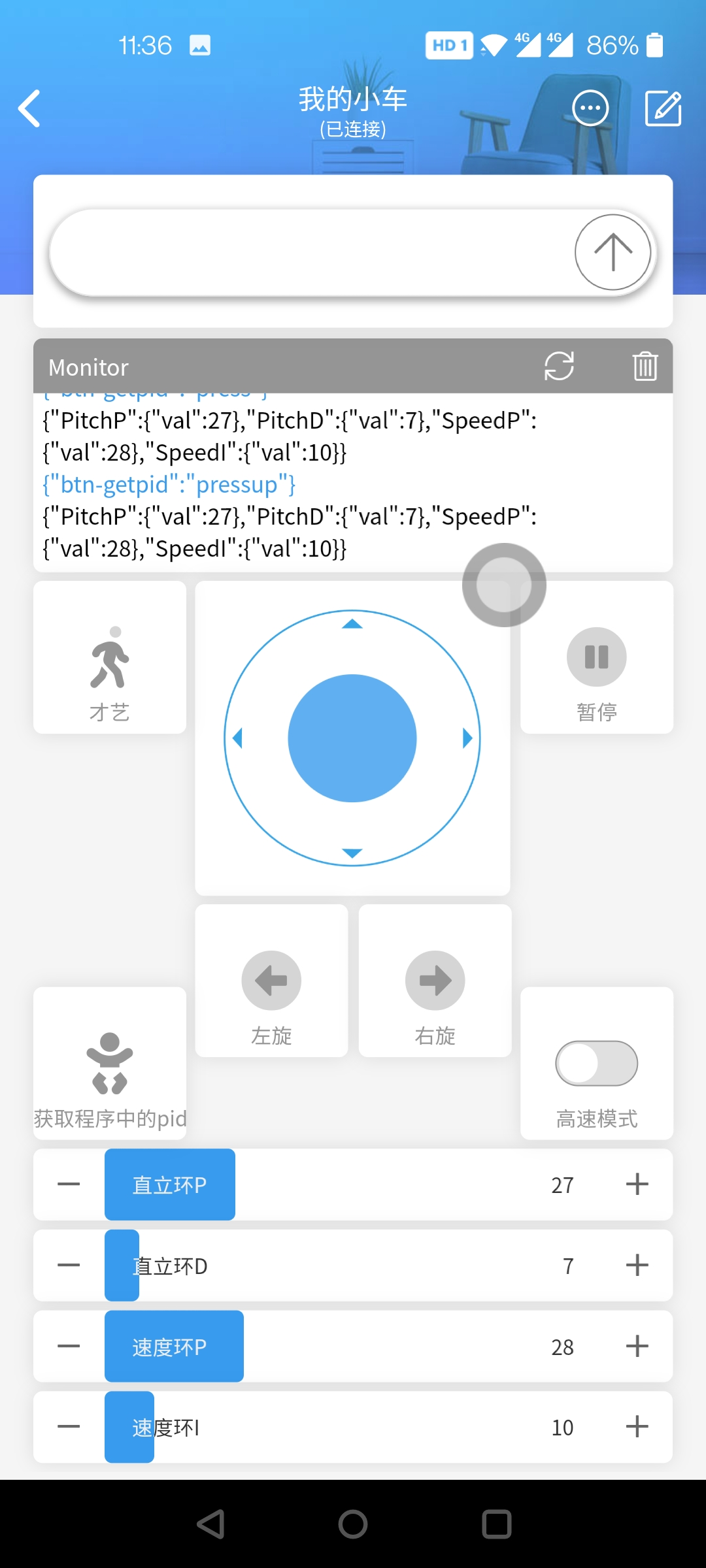
平衡车blink界面设计202303、202304
[hide] 20230307 {¨version¨¨2.0.0¨¨config¨{¨headerColor¨¨transparent¨¨headerStyle¨¨dark¨¨background¨{
什么是电机死区电压、什么是pwm死区
直流电动机的转速与电枢电压成正比,但是当电压很低的时候,电机并不能启动。 电枢电压从零开始,当提高到电机可以转动时的电压成为“死区电压”,意味着低于此电压,电机不能转动。 追问 死区电压和额定电压一般
PID控制器和LQR控制器各有哪些优缺点?
1. PID不能很好处理多变量问题,计算量小,可以不用得到系统模型。 2. LQR是优化控制的一种,通过减小cost得到最优输入。可以处理MIMO系统问题,需要得到MIMO系统模型。计算量比PID大,
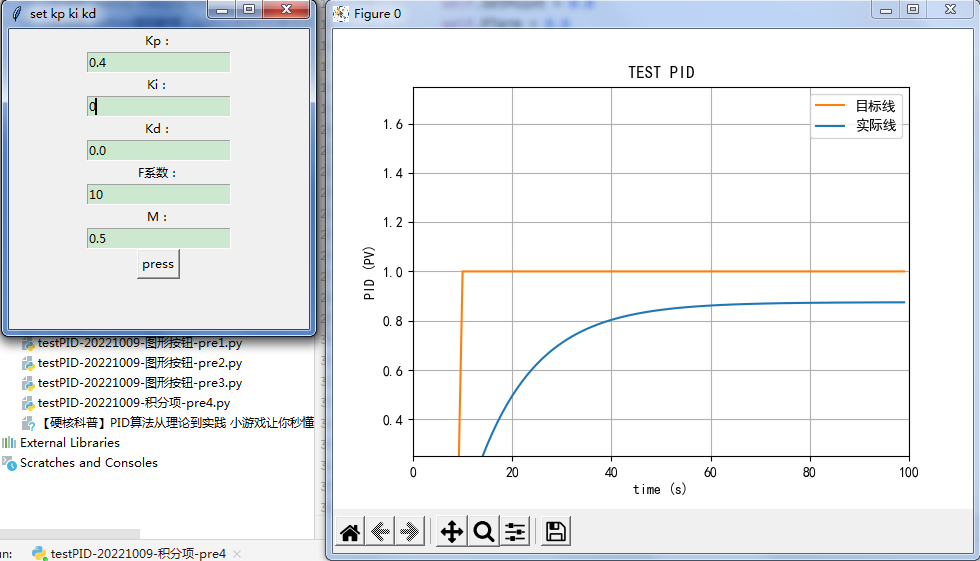
PID程序测试积分项演示
可以看出,随着积分项的引入,稳态误差被消除 [hide] 源代码1 [/hide] 尤其是中值不准的时候: [hide] 源代码2 [/hide] 积分饱和现象多产生于控制器长时间无法消除误差,导致积
文章搜索
分类
热门文章
Tags
关于
提供Arduino芯片编程、Java网站设计、抢票系统、秒杀系统的支持以及创客服务